下(xià)肢運動功能障礙是腦卒中(zhōng)、顱腦損傷、脊髓損傷等患者常見(jiàn)的後遺症之一(yī),患者往往無法恢複和準确掌握步行運動技能。以神經可塑性原理為基礎的機器人(rén)步态訓練,能夠優化(huà)(huà)患者大腦運動功能的重塑,達到“積跬步,以至千裡”的效果,最終幫助患者重新掌握步行運動技能。
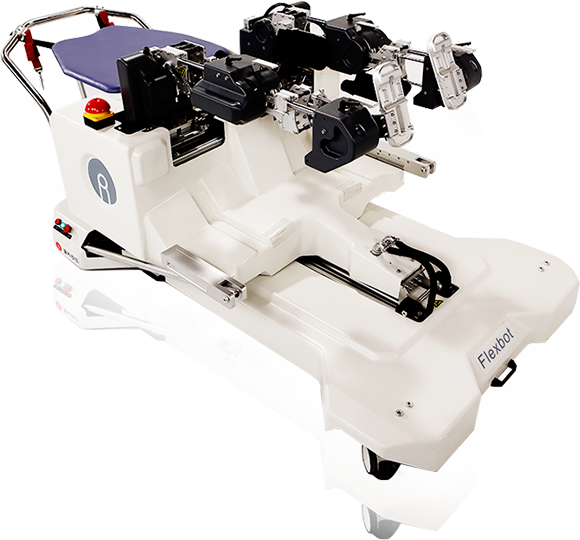

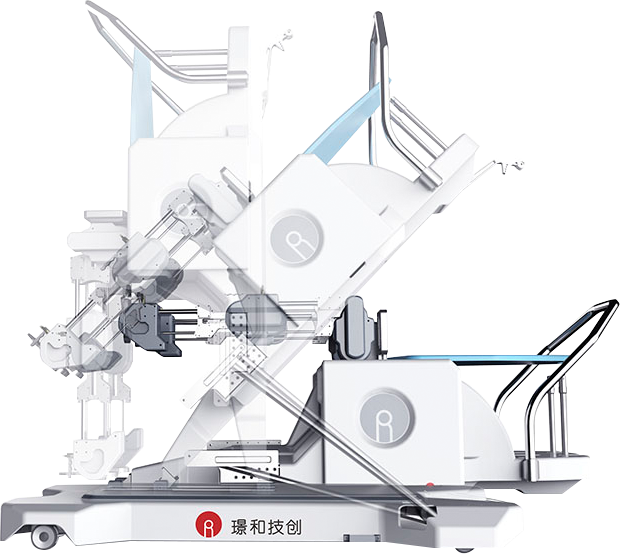
因為一(yī)些(xiē)衰老(lǎo)或是疾病的原因,有些(xiē)人(rén)可能會(huì)站不(bù)穩、走不(bù)動,忘記了怎麼走路,Flexbot機器人(rén)會(huì)循序漸進、從早期躺著(zhe)一(yī)直到漸漸站立起來,慢(màn)慢(màn)引導,帶動他(tā)(tā)的腿,教他(tā)(tā)一(yī)步一(yī)步地(dì)(dì)邁步,重新學習(xí)走路,重塑神經網絡。
三維計(jì)算機圖形技術打造3D虛拟生(shēng)活場景,多功能傳感器交互式技術,将使用者帶入3D虛拟環境中(zhōng),用戶與環境直接進行自(zì)然交互,感知環境、幹預環境 Virtual Reality技術具有多感知性、沉浸性、交互性、構想性,提高患者康複主動參與的程度;反饋評估功能,記錄患者實時的變化(huà)(huà)。

Flexbot機器人(rén)的創新型結構經過精心打造設計(jì),時尚外觀兼具良好性能,不(bù)僅有來自(zì)世界頂尖的元器件(jiàn),更加看(kàn)重使用的方便性與持久的穩定性。打破以往訓練方式,0-90º電動起立設計(jì),實現早期卧床的患者就(jiù)可以進行步态訓練;可電動升降的轉移設計(jì),使得(de)轉移患者更加簡單省力。